

X、Y、Z軸の制御はステッピングモータで行います。X軸とY軸はプーリーをステッピングモータで回しタイミングベルトで位置決めをします。Z軸は台形ネジで位置決めを行います。
直動機構とステッピングモータ
X軸とY軸はオリエンタルモータの5相ステッピングモータを使います。このモータの特徴は専用ドライバのマイクロステップ設定で最小ステップをかなり細かくできます。ドライバ上のDIPスイッチで設定できます。
私のCNCフライスではこの5相ステッピングモータを入れていますが非常に安定して動作してくれてます。動作音も小さいです。
タイミングベルトとプーリーは以下の商品を選びました。これはモノタロウで購入しました。
スーパートルクタイミングベルトS3M 100型 ピッチ 3mm
スーパートルクタイミングプーリ(アルミ製) S3M100形 15歯

直動にはリニアシャフトとリニアブッシュを使います。X軸とY軸の直動部分を抜き出した図です。
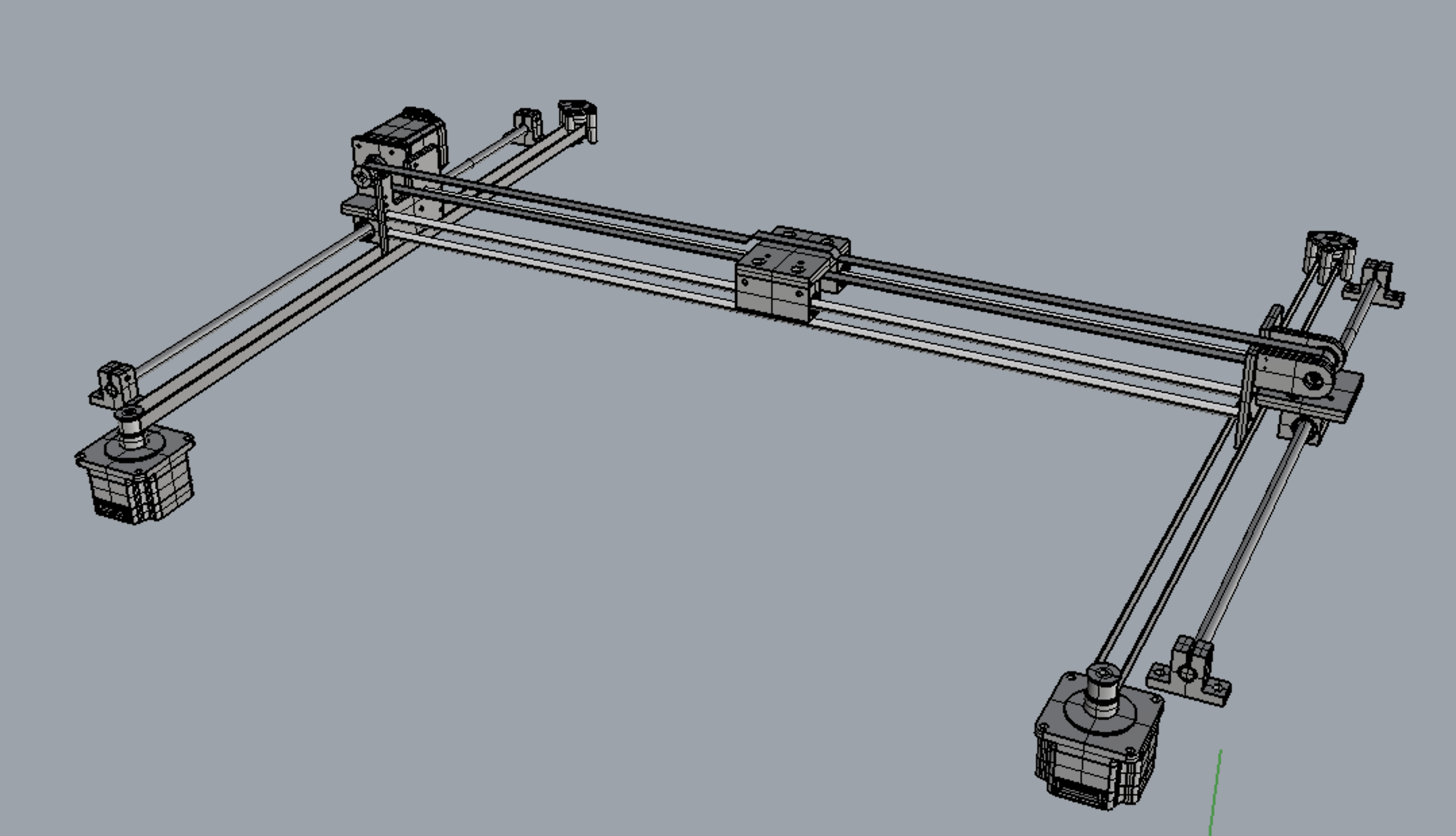
X軸はモータ1台で駆動、Y軸は左右2台のモータで駆動します。プーリーはモータ軸と反対側の端で合計6個必要になります。モノタロウから買ったプーリーの穴はモータ軸に合わないのでモータ軸に合わせて加工します。この加工には旋盤が必要です。
話が前後しますが、プーリーが決まった段階でオリエンタルモータのモータ選定ソフトで計算して必要なモータを求めました。移動速度は端から端まで2秒で移動するとして計算しました。安全係数は2.0としました。
選んだモータとドライバは次の通り。
X軸
PKP546N18A2+CVD518B-K+LC5N06E
数量:1
Y軸
PKP564N28A2+CVD528B-K+LC5N06E
数量:2
Z軸
PKP266D28A2+LC2B06E
数量:2
購入はオリエンタルモータのwebショップでも良いのですが近所の工具店の方が安いのでそちらに発注しました。webショップだと定価販売ですが工具店だと1割引ぐらいになります。発注もメールだけでできるので簡単。支払いは現金。商品も家まで届けてくれます。ネット以外のルートも持っていると便利です。
制御ボード
制御ボードはArduino UNOにgrblをインストールして使います。
grblの入手先はこちらhttps://github.com/gnea/grbl
インストールの仕方はhttps://github.com/gnea/grbl/wiki/Compiling-Grbl
Arduino UNOは互換のこちらを使ってます。価格が1/3以下というのは魅力です。macにつないで使ってますがいまのところ問題無く動作しています。

Arduino UNOとモータドライバの接続にはブレークアウトボードが必要になります。最初はイギリス製のブレークアウトボードを試しました。しかしなぜか動作不良。そこでブレークアウトボードも自分で設計して自作することにしました。Arduinoのシールドは両面基板にする必要があるのでFusion PCBに発注しました。設計はKiCAD。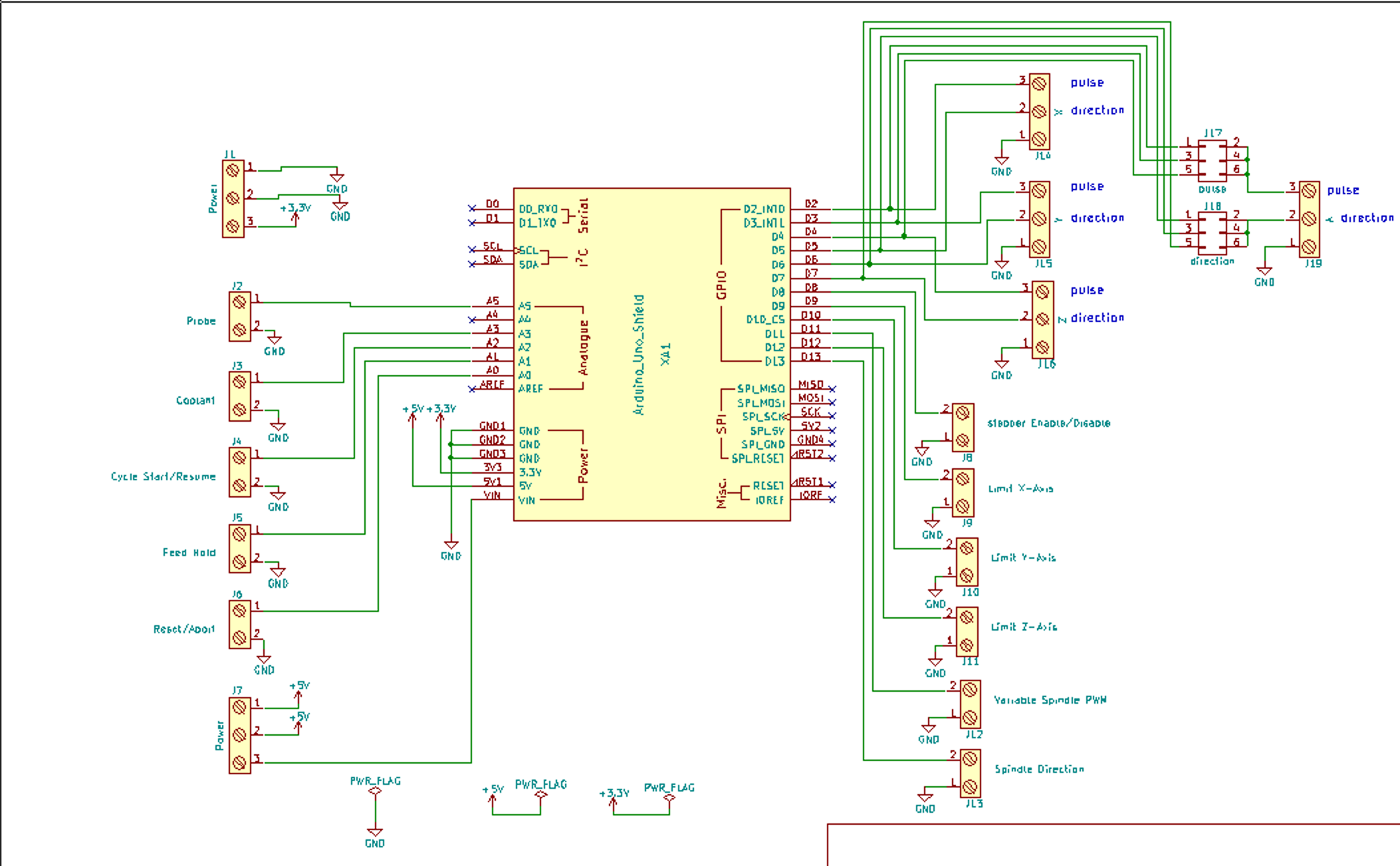
配線図
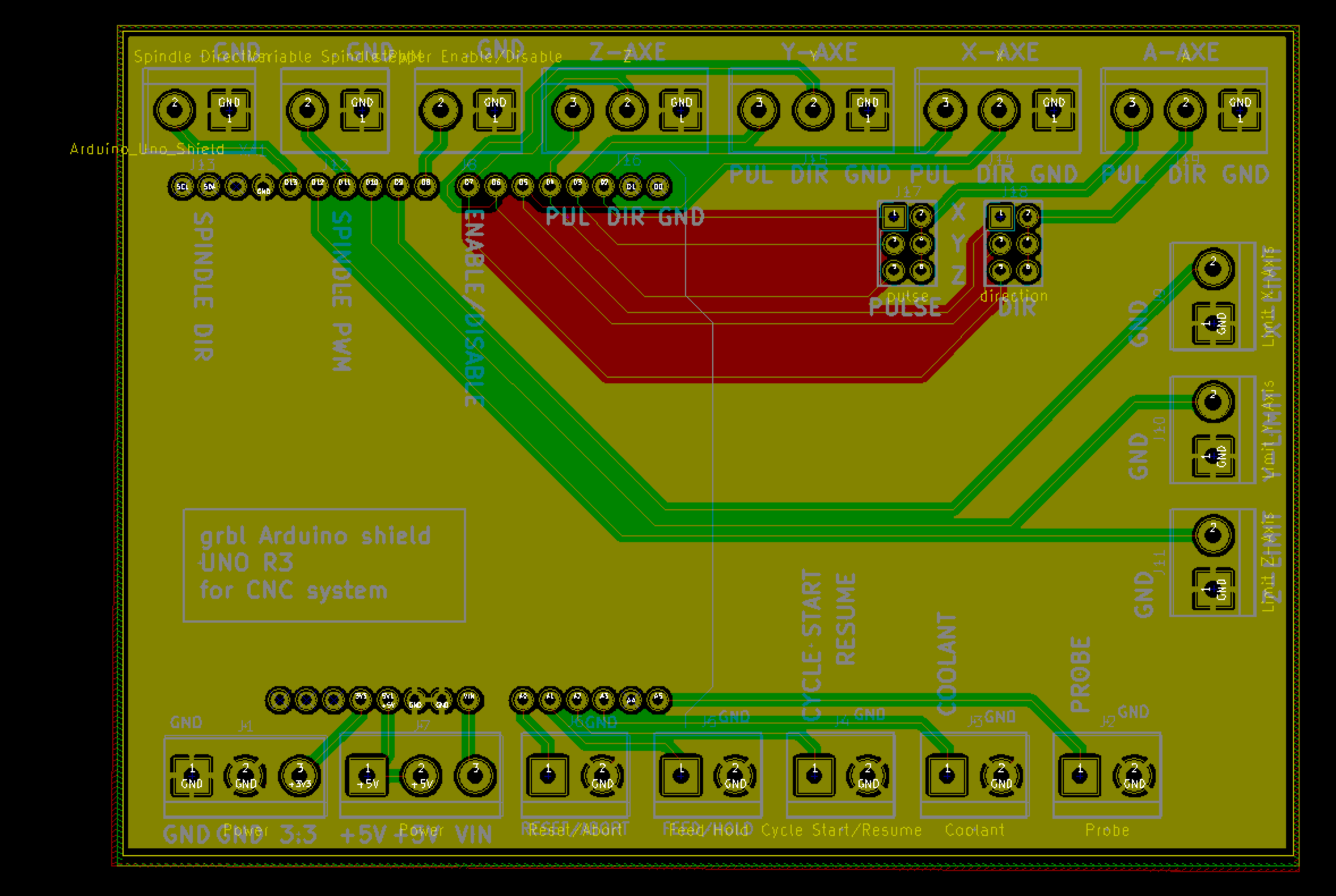
基板パターン
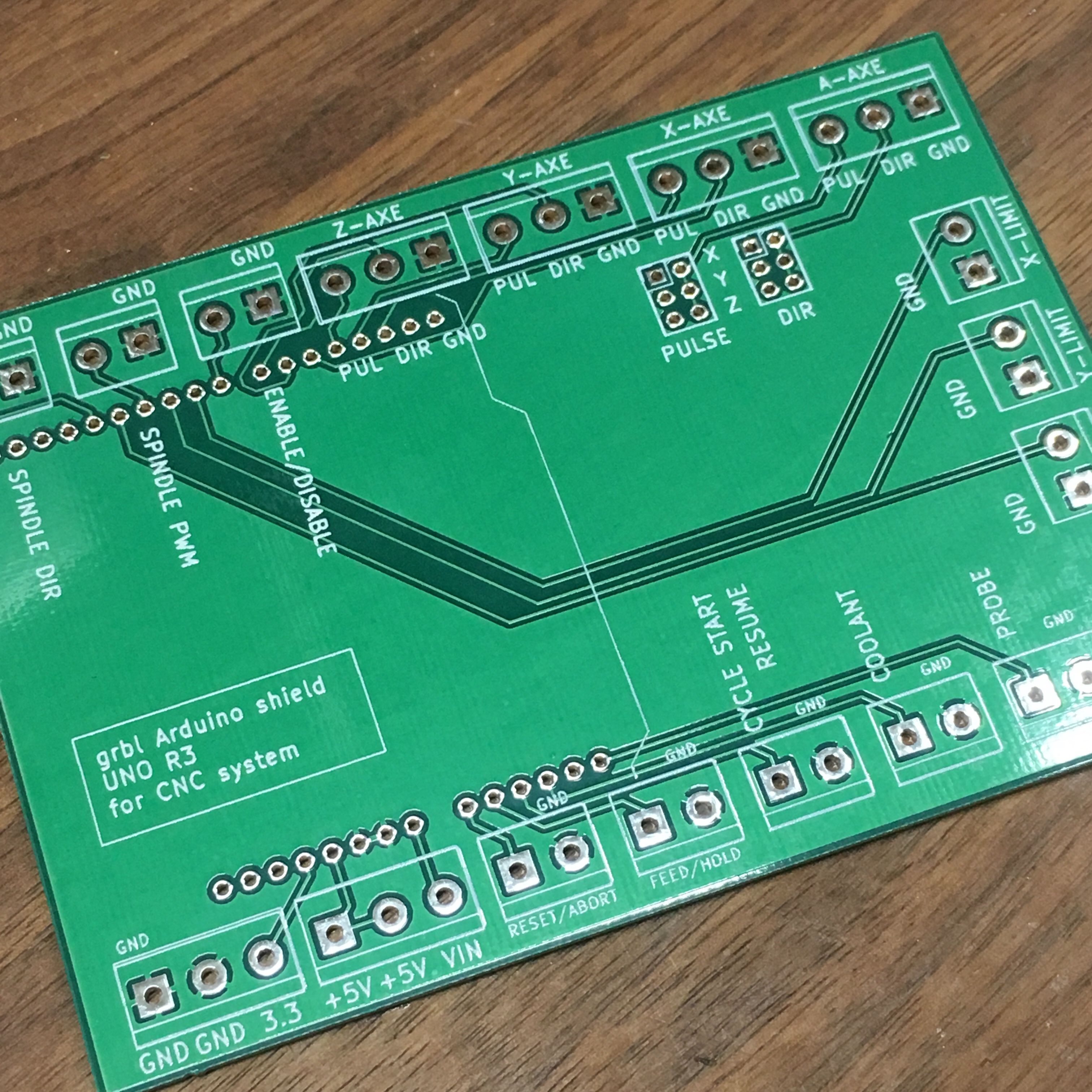
FusionPCBに発注した基板
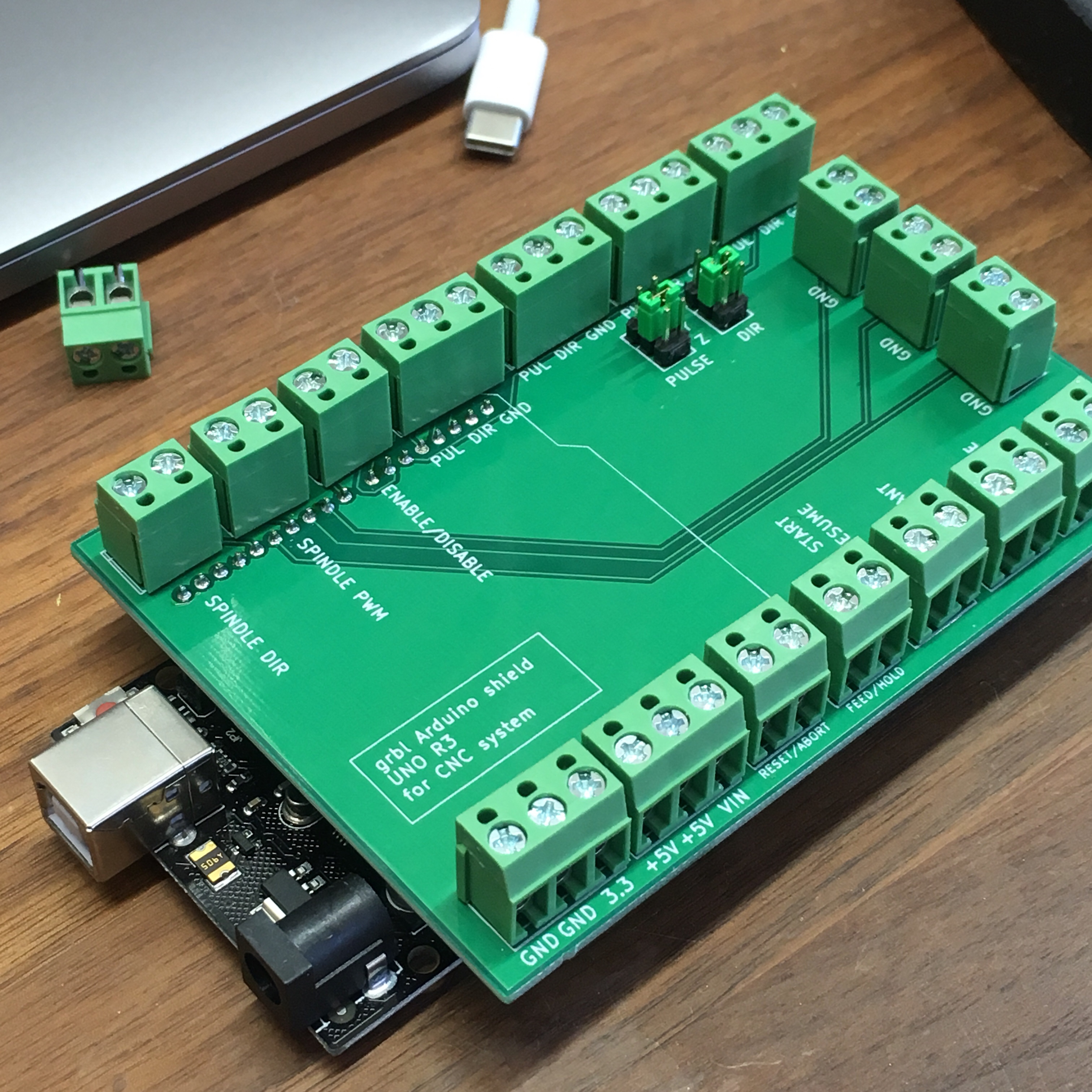
端子は秋月電子で買った物。
全部緑になってしまった。基板の色を変えればよかった。。。
X軸には2つのドライバが接続になります。このブレークアウトボードは任意の軸を複数のドライバに出力できるようにしてあります。Z軸も2台のドライバに繋がりますが、そこは適当に処理しています。
X軸のモータは2台が逆回転する必要があります。DIR信号を反転させる方法もありますが、モータの結線を反対にすると逆回転になるのでコネクタの配線を逆にしています。
モータドライバ
ステッピングモータのドライバとの接続は下図のようになります。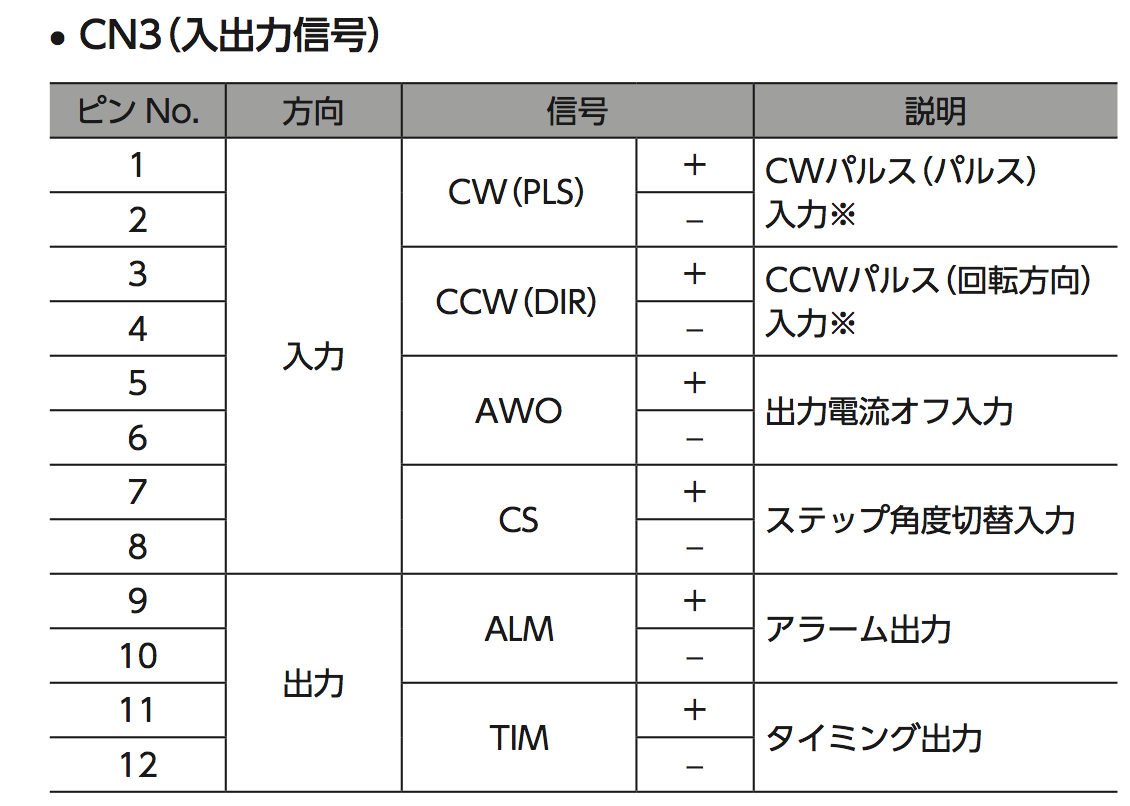
オリエンタルモータの取り扱い説明書から引用
grblで使う場合には回転方向とパルスを入力する1パルス方式なのでドライバ上のDIPスイッチで1Pに設定します。そしてArduinoとの接続ですが
1pin – PLS
2pin – GND
3pin – DIR
4pin – GND
となります。他のピンは繋がなくても動きます。
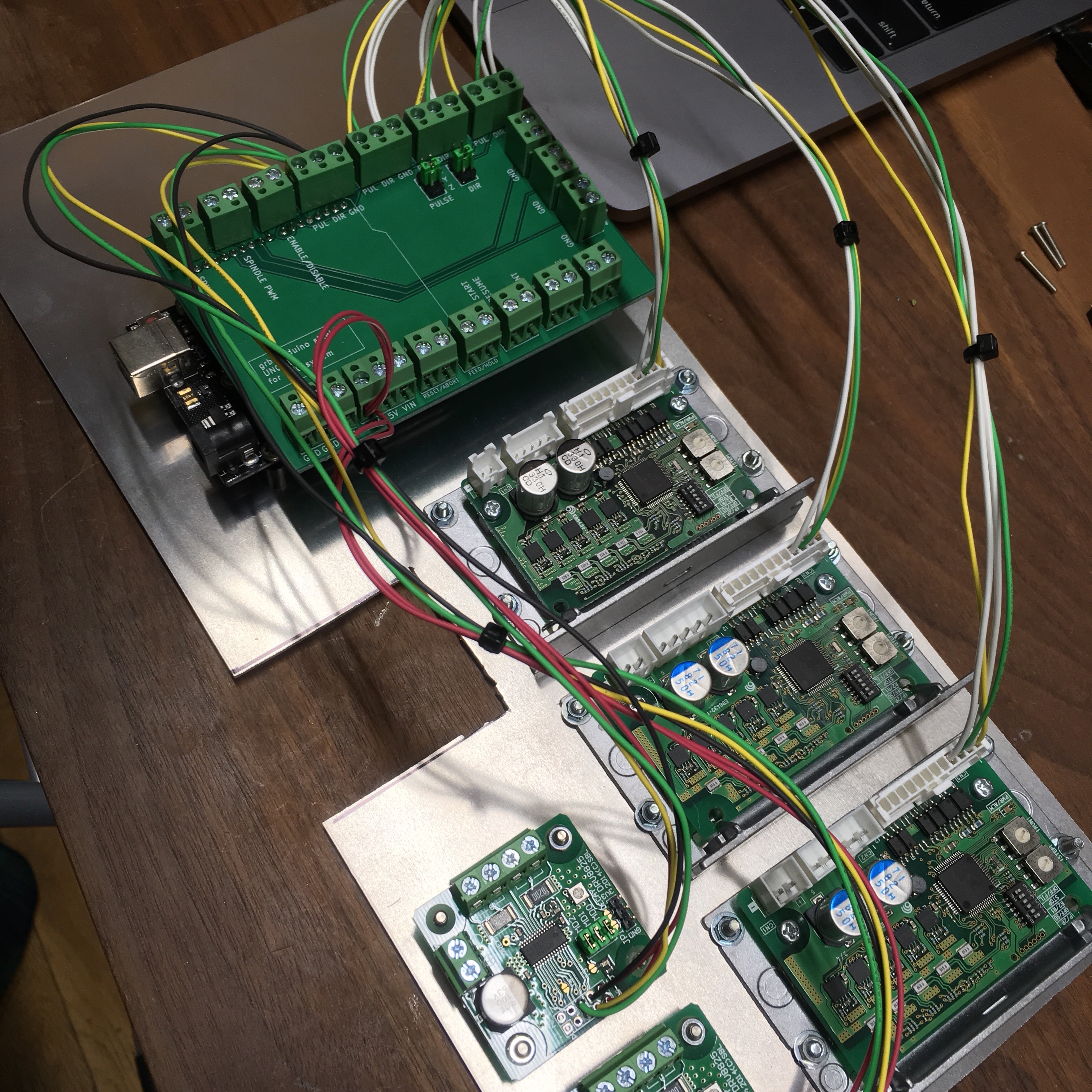
3台あるのがオリエンタルモータの5相ドライバ
2台あるのはDRV8825ステッピングモータドライバ(https://strawberry-linux.com/catalog/items?code=12025)です。上の写真ではコントロール陽の配線をしたものです。このあと電源とモータへの配線がつきます、
モータの回転角度と移動量の計算
各軸の設定値ですがx軸とY軸は次のようになります。
タイミングベルトのピッチ:3mm
プーリーの歯数:15歯
モータ1回転で15歯まわります。1歯=1ピッチなので 15歯/r x 3mm = 45mm/r
1回転で45mm移動します。
ステッピングモータの基本ステップは0.72degですが
ドライバの分解能を10,000P/Rとすると
10,000で1回転、45mm移動します。
1mmの移動には10,000/45 = 222.2222(222P)
となります。
分解能は0.0045mm(4.5μm)。レーザーカッターとしては十分な性能でしょう。
Z軸は2相モータで基本ステップが1.8degです。1回転には200ステップ。ドライバはDRV8825で最大1/32のマイクロステップになります。
モータ1回転に必要なパルスは200×32=6400。最小角度は 1.8/32 =0.05625deg
台形ネジのピッチは2mmなので1回転で2mm進むことになります。
1mmの移動には6400/2 = 3200
となります。