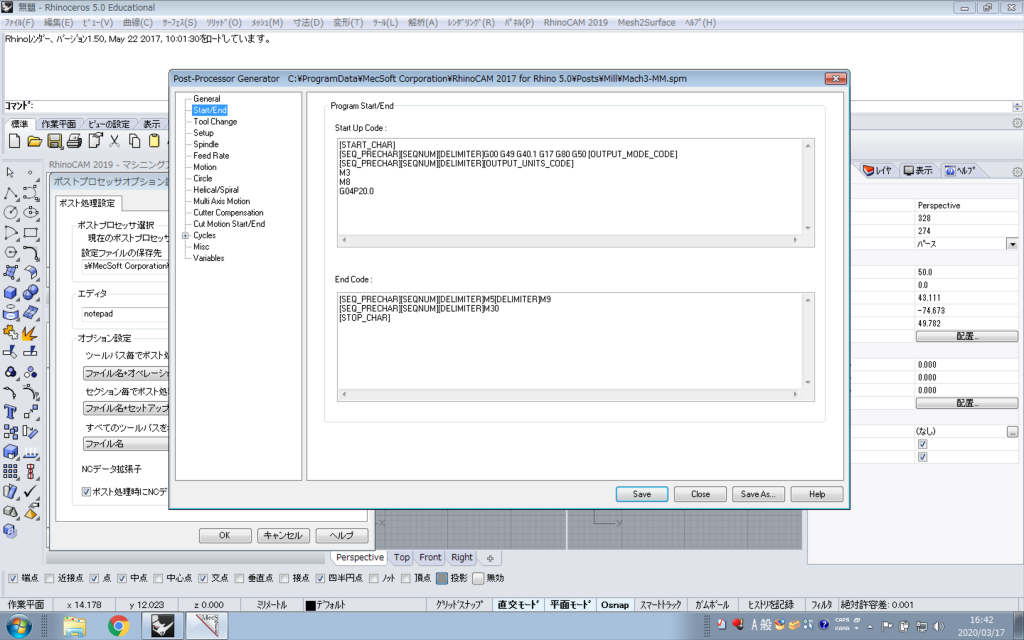
切削用のGコードを作るのに今までRhinoCAMを使っていましたがFusion360に乗り換えたいと思います。その忘備録。
標準のMach3ポストプロセッサでは最初にZ=0に移動したり、最後に原点に移動する、スピンドル起動直後の待ち時間が無い、など使いにくい点があります。それを改善します。

切削用のGコードを作るのに今までRhinoCAMを使っていましたがFusion360に乗り換えたいと思います。その忘備録。
標準のMach3ポストプロセッサでは最初にZ=0に移動したり、最後に原点に移動する、スピンドル起動直後の待ち時間が無い、など使いにくい点があります。それを改善します。
バネやゴムに引っ張られて振動する動きをProcessingで作ってみます。
続きを読むProcessingで気持ちの良い動きを実現する方法です。気持ちの良い動きとは私たちが日常の中で見かける自然な動きです。その動きを画面の中で再現するには物理的なアプローチが有効です。
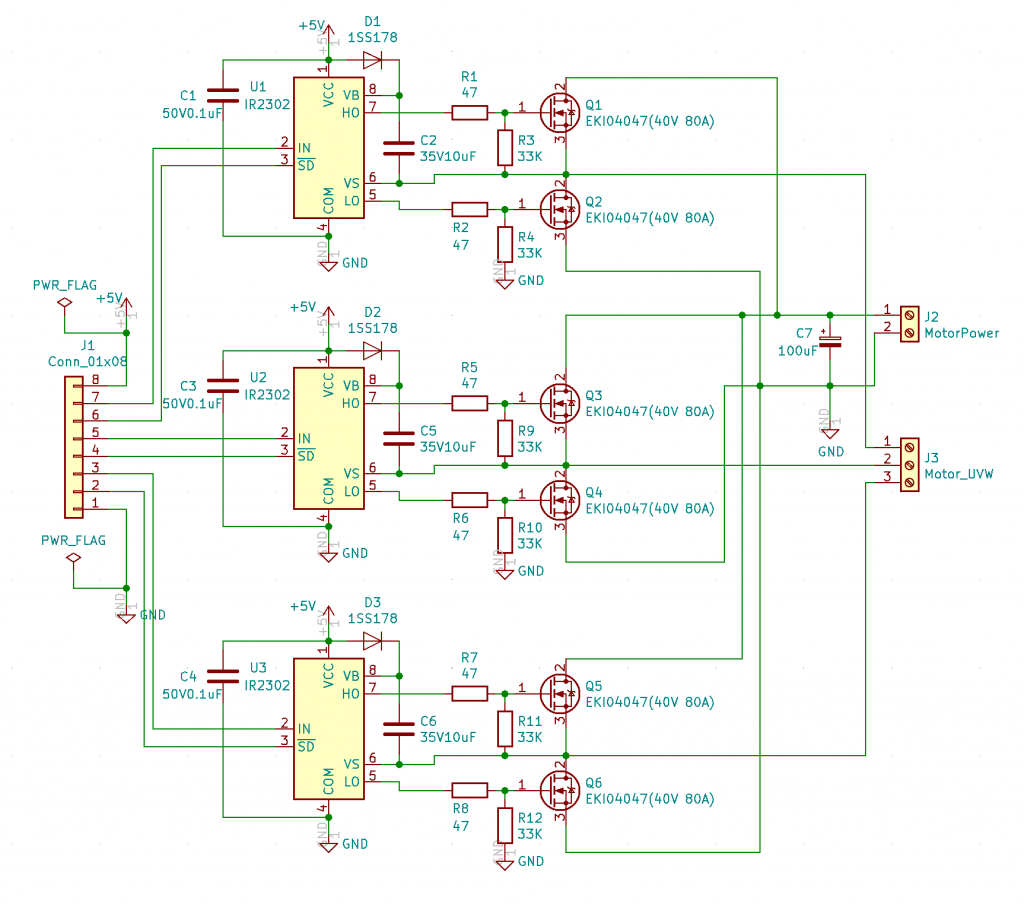
続きを読むブラシレスモータを回すにはラジコン用のESCを使うのが簡単です。ArduinoとESCを接続して回すことも出来ます。モータを高速回転させるにはそれで良いのですがゆっくり回したい場合など特殊な使い方をしたい場合にはESCを作る必要があります。
スタイロフォームをカットするCNCマシーンを作りました。制御はProcessingで作ったオリジナルのソフトウェア。オリジナルマインドさんのものづくり文化展で「Aircode賞」を受賞! 続きを読む
 PHPからGoogle Maps APIを使う方法の紹介です。JavaScriptからの方法はけっこう情報があるのですがPHPからは情報が少ない?常識なんかな?
PHPからGoogle Maps APIを使う方法の紹介です。JavaScriptからの方法はけっこう情報があるのですがPHPからは情報が少ない?常識なんかな?
続きを読む
 今までの手順で作成した白地図は県の輪郭線が途切れていました。そこで輪郭線が途切れない様に処理を変更しました。市区町村の重なりを求め削除し、そこから都道府県の輪郭線を作るという流れは同じですが、市区町村の重なりを作った時に内側に一つ座標を短くしています。それにより都道府県の輪郭が切れずに求まります。
今までの手順で作成した白地図は県の輪郭線が途切れていました。そこで輪郭線が途切れない様に処理を変更しました。市区町村の重なりを求め削除し、そこから都道府県の輪郭線を作るという流れは同じですが、市区町村の重なりを作った時に内側に一つ座標を短くしています。それにより都道府県の輪郭が切れずに求まります。
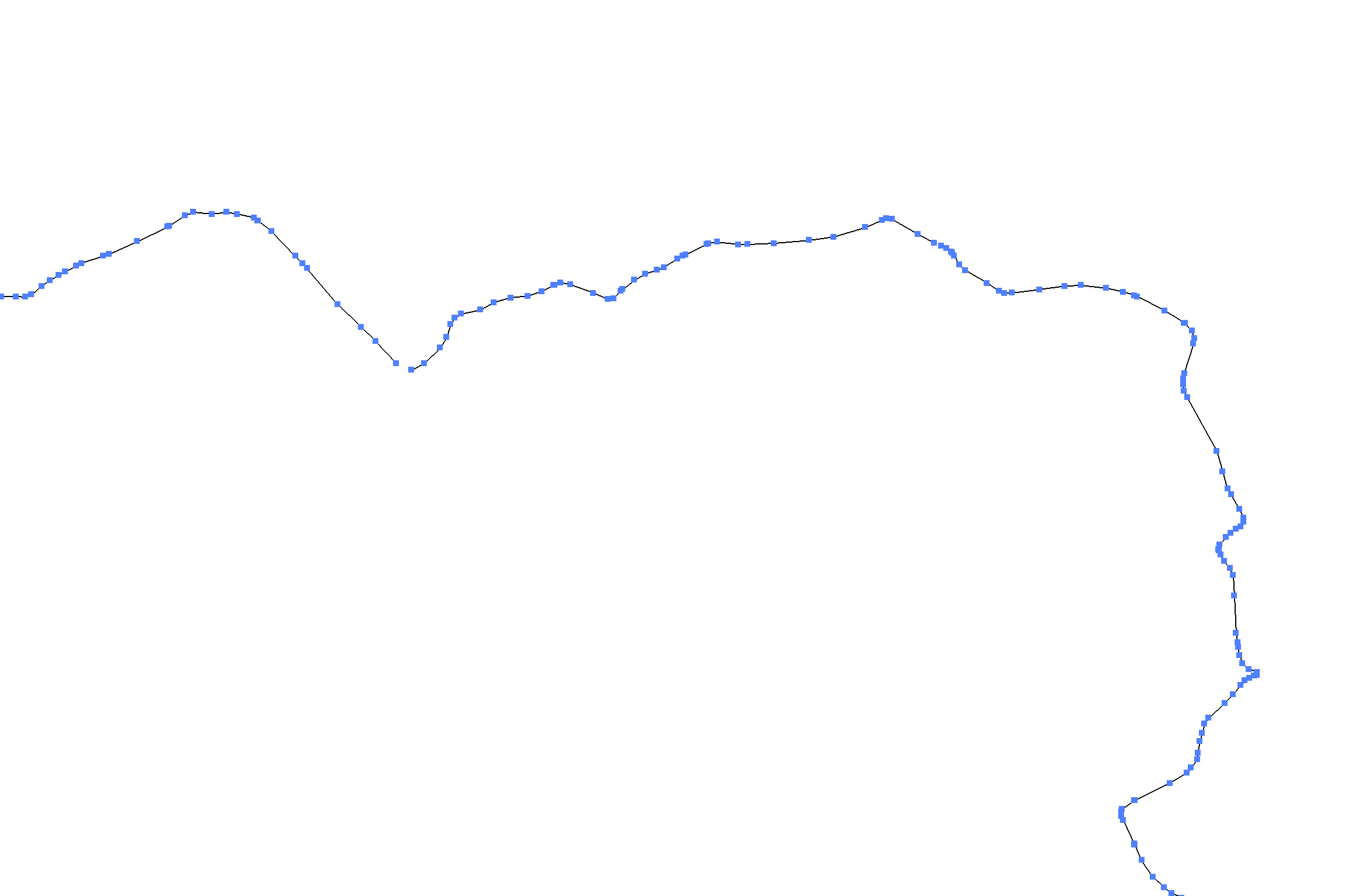
使いやすい白地図にするために適度なサイズで閉じた曲線の地図を作成したいと思います。市区町村の境界線を削除した段階で県境の線が途切れています。上図は群馬県の部分を拡大したものです。各都道府県にこのような途切れた部分があります。重なった点を削除しているので線が途切れてしまってます。この問題をなんとかしてデータを軽くする方法を考えます。
 県境なしの白地図を作ります。県境を削除するには市区町村の境界線を消したのと同じ様な手順で作業をします。そして、現在のデータ量ではIllustratorでの表示には重すぎるのでデータを軽く扱いやすいサイズまで落とします。
県境なしの白地図を作ります。県境を削除するには市区町村の境界線を消したのと同じ様な手順で作業をします。そして、現在のデータ量ではIllustratorでの表示には重すぎるのでデータを軽く扱いやすいサイズまで落とします。
